IJCRR - 9(22), November, 2017
Pages: 35-38
Print Article
Download XML Download PDF
Reduction of Side Lobes of Radar signals for Complementary Code using Particle Swarm Optimization
Author: D. Tirumala Rao, P. Rajesh Kumar, K. Raja Rajeswari
Category: Technology
Abstract:Doppler resolution is the ability to determine the relative speed of the target along the line of sight from the radar whereastheRange resolution is the ability of the radar receiver to discriminate nearby targets. The performance of range and Doppler resolutions of radar would be optimal, if the coded waveform has impulsive autocorrelation function (ACF).Complementary codes waveforms provide better resolutions compared to other pulses. A desirable property of the compressed pulse is that it should have low side lobes in order to prevent a weaker target from being masked in the side lobes of a nearby stronger target. When
the side lobes are relatively lower than the main lobe peak, the main peak can be distinguished in a better way and hence the corresponding code will be much better. In this we have proposed the PSO algorithm to design the complementary code for better performance measures like peak sidelobe ratio(PSLR) and integrated sidelobe ratio(ISLR) and compared with matched filter values. The performance measures influence in discriminating the target in the noise environment.
Keywords: ACF, PSO, PSLR and ISLR
DOI: 10.7324/IJCRR.2017.9228
Full Text:
Introduction
Complementary sequences, which have the property that the sum of their autocorrelation functions vanishes at all delays other than zero [1]. In the existing system of radar communication, the electromagnetic wave is being used for detection of targets in the radar receivers by extracting the received echo signal with the help of codes like Barker, Walsh and Golay codes to find the location and range of the target. But problem occurred i.e., high side lobes are here one occurred in some cases where they dominate the main lobe it causing False Alarm. In proposed system to avoid the side lobes or False alarm by using the new technique i.e., complementary codes are used instead of Barker, Walsh and Golay codes to to get nearer to zero side lobes which eases to find the target location and range of radar[2].
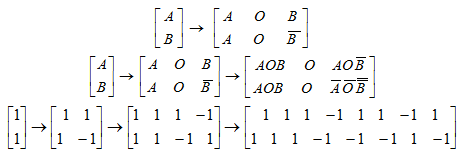
Generation of Complementary Code Pairs
The generation of complementary codes is presented with a concept that sum of autocorrelation functions is double the length of the sequence for zero shifts and zero for other shifts. The energy efficiency of the sequences is found as unity or 100% [4]. The choice of the selection of the sequence in the case of complementary sequences is restricted to a few numbers of sequences.
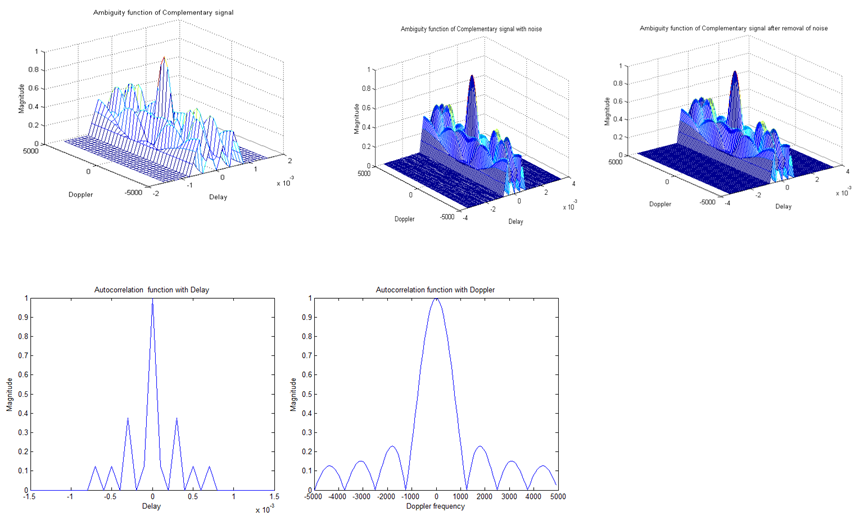
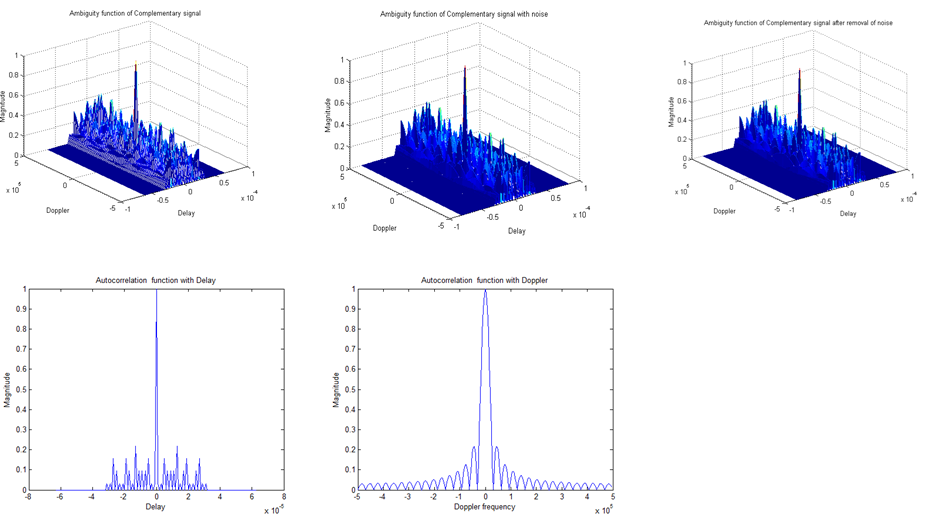
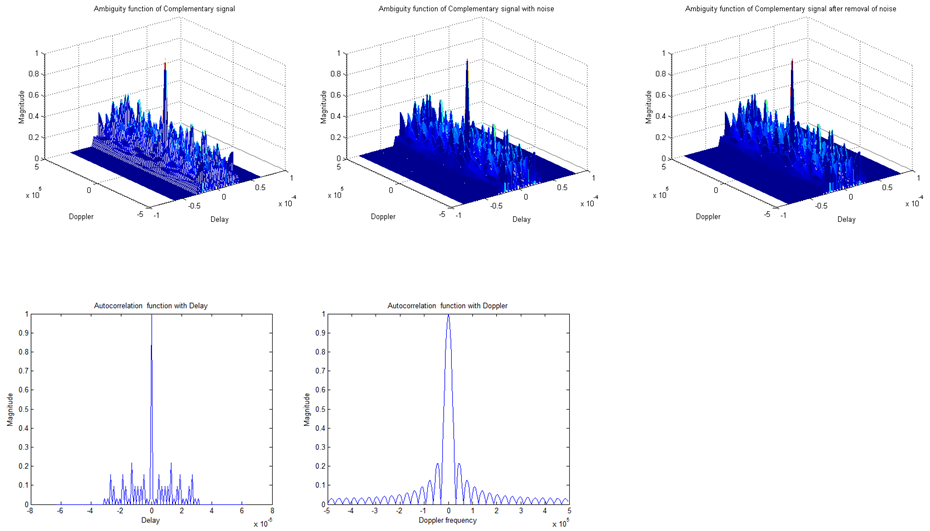
The radar ambiguity function is the output of the matched filter which provides the information about how different waveforms may be suitable for various radar applications. The behavior of complementary sequences is studied in ambiguity domain[5]-[10].
Let
S=(x0,x1,x2, ………..xn-1,) 1
be a real sequence of length N.
Consider the following two subsequences as an example of a complementary code pair
S1 = {1, 1, 1, –1, 1, 1, –1, 1} 2
S2 = {1, 1, 1, –1, –1, –1, 1, –1} 3
The ACF’s of the subsequences in (2.2) and (2.3) are respectively
r1(k) = {1, 0, 1, 0, 3, 0, –1, 8, –1, 0, 3, 0, 1, 0, 1} 4
r2(k) = {–1, 0, –1, 0, –3, 0, 1, 8, 1, 0, –3, 0, –1, 0, –1} 5
Adding the two auto correlation functions together, element-by-element, generates the final decoded sequence, r(k)= r1(k) + r2(k) given by
r(k) = {0, 0, 0, 0, 0, 0, 0, 16, 0, 0, 0, 0, 0, 0, 0} 6
A complementary code pair consists of two equal length subsequences with the property that the algebraic sum of the Auto Correlation Functions’ (ACFs) of the subsequences is zero expect for only one sample point (r (0)) as given in equation.
ACF of the subsequences in (2.4) and (2.5) are respectively
R11= {1 0 1 0 3 0 –1 8 –1 0 3 0 1 0 1} 7
R22= {-1 0 -1 0 -3 0 1 8 1 0 -3 0 -1 0 -1} 8
R(k) represents Auto Correlation Function’s (ACF’s) of two equal length subsequences with the property that the algebraic sum of the Auto Correlation Function’s (ACF’s) of the subsequences is zero expect for only one sample point (r (0)), R(11) and R(12) represents Auto Correlation Function’s (ACF’s) of 8bit Sequence.
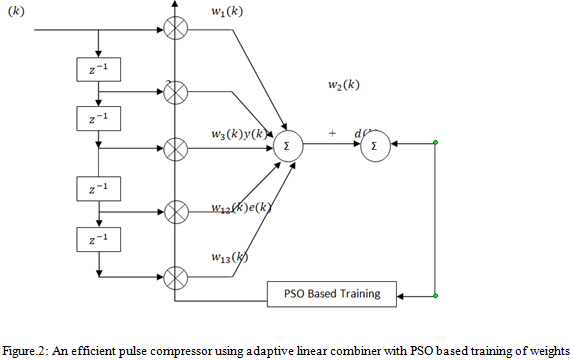
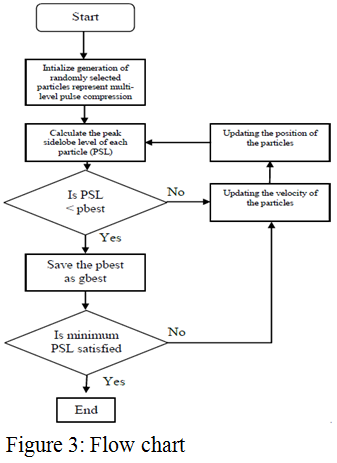
Development of PSO Based Compressor

The complementary code sequencex(k) is applied at the input as shown in Fig.1 serially and the desired signal is zero in all other cases except a one in the middle. The comparison of desired value and the estimated output y(k) produces an error term e(k).The input and error values are used to update the mismatched filter until the desired output is obtained [11]. PSO simulates the behaviours of bird flocking. Consider a group of birds are randomly searching food in the confined area. There is only one piece of food in the confined area being searched. All the birds do not know where the food is. But they know how far the food is in each iteration. So what's the best strategy to find the food? The effective one is to follow the bird which is nearest to the food.In PSO, each single solution is a "bird" in the search space. We call it a "particle". All the particles have velocities which direct the flying have fitness values and are evaluated by the fitness function to be optimized. The particles fly through the problem space by following the current optimum particles.PSO is initialized with a group of random solutions (particles) and then searches for optima by updating iterations (generations). In every iteration, each particle is updated by following two "best" values. The first one is the best solution (fitness) it has achieved so far. The fitness value is also stored and is called as pbest. Another "best" value that is tracked by the particle swarm optimizer is the best value, obtained so far by any particle in the population. This best value is a global best and denoted as gbest [12]-[17]. When a particle takes part of the population as its topological neighbours, the best value is a local best and is called lbest.After finding the two best values, the particle updates its velocity and positions with following equations 1 and 2.

Results
The 16, 32&64bit Complementary code are perturbed by additive white Gaussian noise (AWGN) with different SNRs. The ISLRs & PSLRs performances of the proposed mismatched filter under noisy conditions are evaluated through simulation and are listed in Tables 2&3.
To observe the performance measures ISLR & PSLR using PSO, first the matched filter (Direct) values are computed for the applied complementary codes of 16, 32&64 bit and noted in the tablesin range and Doppler domains and the proposed performance measures (ISLR & PSLR)are compared and shown in tables 1, 2&3 with corresponding ambiguity diagrams.
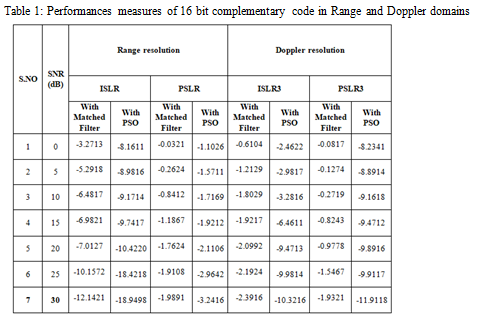
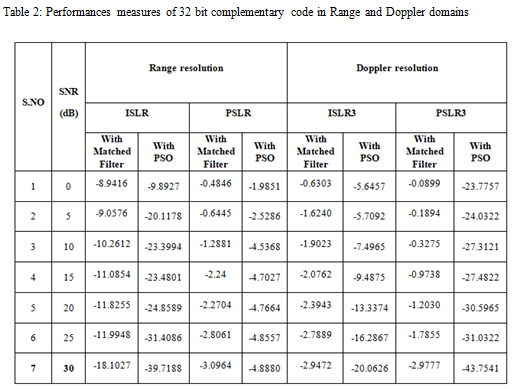
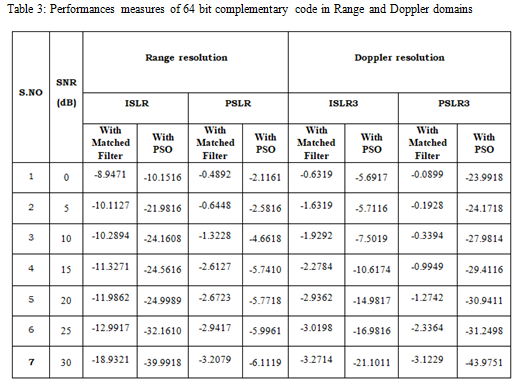
Discussion: The main performance measures ISLR & PSLR in range & doppler domains of signal under study are evaluated. PSO algorithm is used to find the target location by applying complementary codes. The main purpose of this study is to analyze which of these signals have the better (lower) values of Peak Side lobe Level and Integrate Side lobe Level. Here the performance measures ISLR & PSLR in range &Doppler domains with PSO algorithm are shown in the tables 1,2&3 for comparison with matched filter (Direct) values.
Conclusions
Based on the results obtained, the noise performance measures, ISLRs & PSLRs are calculated for 16, 32 &64 bit lengths of complementary code. In all these cases the calculated values of ISLRs and PSLRs using ACF with PSO are low in magnitude. As SNR increases ACFs of ISLR & PSLR and ISLR3& PSLR3 decreases in 16, 32& 64 bit complementary codes in Range and Doppler domains. After applying PSO algorithm, the ISLRs & PSLRs values for 16, 32&64bit lengths at different SNRs i.e. 0, 5, 10,15,20,25 &30dB are falling to lower values than the values with matched filter. This indicates falling of side lobes (or reduction of side lobes) with PSO algorithm.
Acknowledgements
Authors acknowledge the immense help received from the scholars whose articles are included in references of this manuscript. The authors are also grateful to authors / editors /publishers of all those articles, journals and books from where the literature for this article has been reviewed and discussed
References:
- M. I. Skolnik, Introduction to radar system. New York: McGraw-Hill, 1980.
- C. E. Cook and M. Bernfeld, Radar signals: An introduction to theory and application. Academic Press, New York, 1967.
- D.K. Barton, Pulse Compression. Artech House, 1975.
- A.W. Rihaczek, Principle of high resolution radar. McGraw Hill, New York, 1969.
- N. Levanon and E. Mozeson, Radar Signals. Wiley New York, 2004.
- P. M. Woodward, Probability and information theory, with application to radar. Pergamon Press, Oxford, 1953.
- Davis, L., Ed. (1991). Handbook of Genetic Algorithms. Van Nostrand Reinhold, New York, NY.
- Eberhart, R. C. and R. W Dobbins (1990). Neural Network PC Tools: A Practical Guide.
- Academic Press, San Diego, CA.
- Fisher, R.A. (1936). The use of multiple measurements in taxonomic problems. Annals ofEugenics, 7: 179-188.
- Heppner, F. and U. Grenander (1990). A stochastic nonlinear model for coordinated bird flocks.
- In S. Krasner, Ed., The Ubiquity of Chaos. AAAS Publications, Washington, DC.
- Holland, J. H. (1992). Adaptation in Natural and Artijlcial Systems. MIT Press, Cambridge,
- Millonas, M. M. (1994). Swarms, phase transitions, and collective intelligence. In C. G. Langton, Ed., Artijicial Life III. Addison Wesley, Reading, MA.
- Reeves, W. T. (1983). Particle systems - a technique for modeling a class of fuzzy objects. ACM Transactions on Graphics, 2(2):91-108.
- [SI Reynolds, C. W. (1987). Flocks, herds and schools: a distributed behavioral model. Computer Graphics, 2 1 (4):25-34.
- Wilson, E.O. (1975). Sociobiology: The new synthesis. Belknap Press, Cambridge, hlA
|
 IJCRR
IJCRR 





 This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License
This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License





